包装码垛机械手
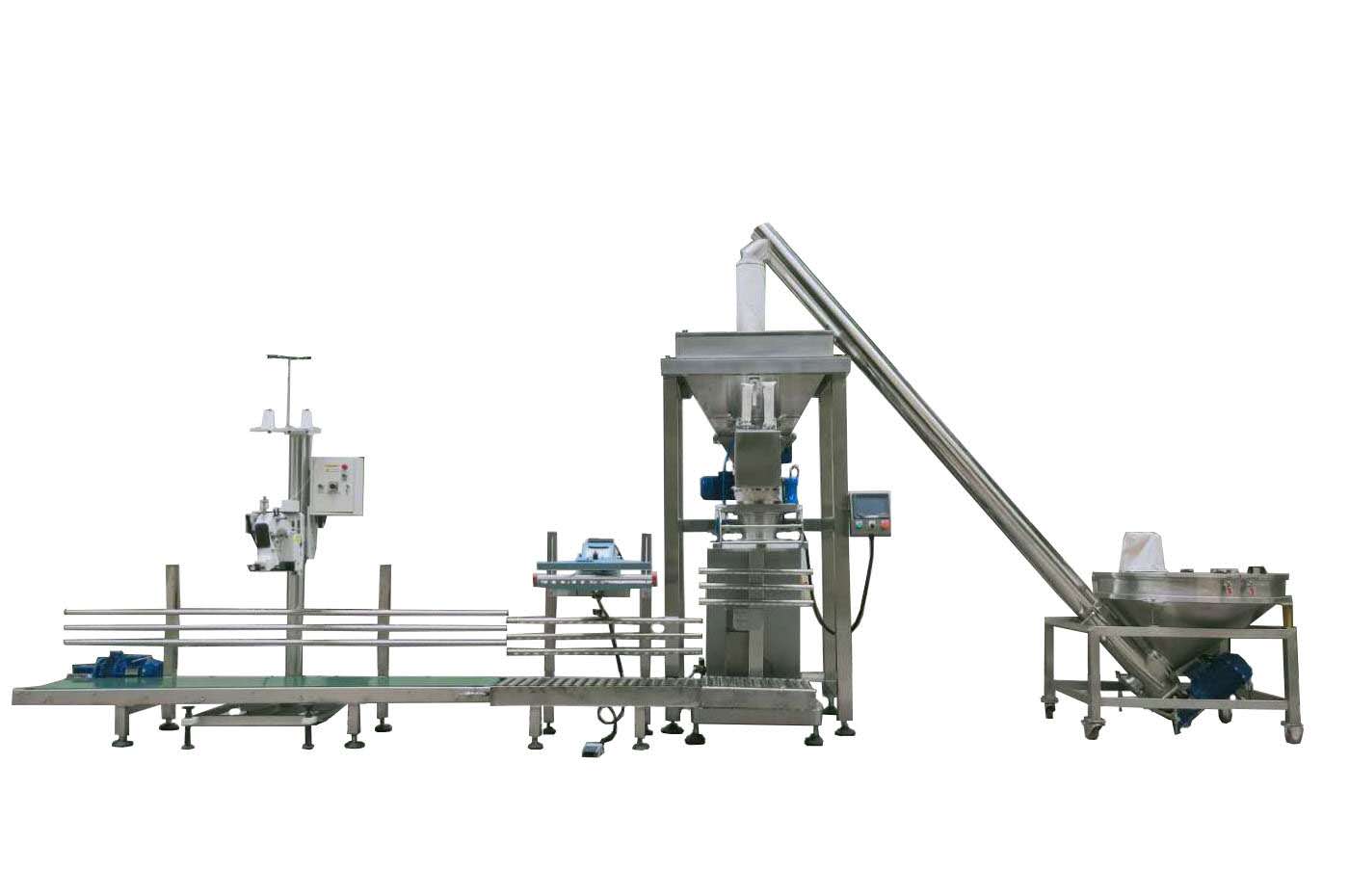
1.什么是码垛机机械手 包装码垛机械手是专为包装生产线设计开发的自动化生产设备,广泛应用于各种包装生产线。只需要简单地设置操作步骤就可以适应新的包装规格其设备的灵活性
专属业务员联系方式:13501932366
服务热线:13501932366
产品详情
1.什么是码垛机机械手
包装码垛机械手是专为包装生产线设计开发的自动化生产设备,广泛应用于各种包装生产线。只需要简单地设置操作步骤就可以适应新的包装规格其设备的灵活性可以允许处理很
多不同形状和大小的产品和包装盒。
2.码垛机机械手优势
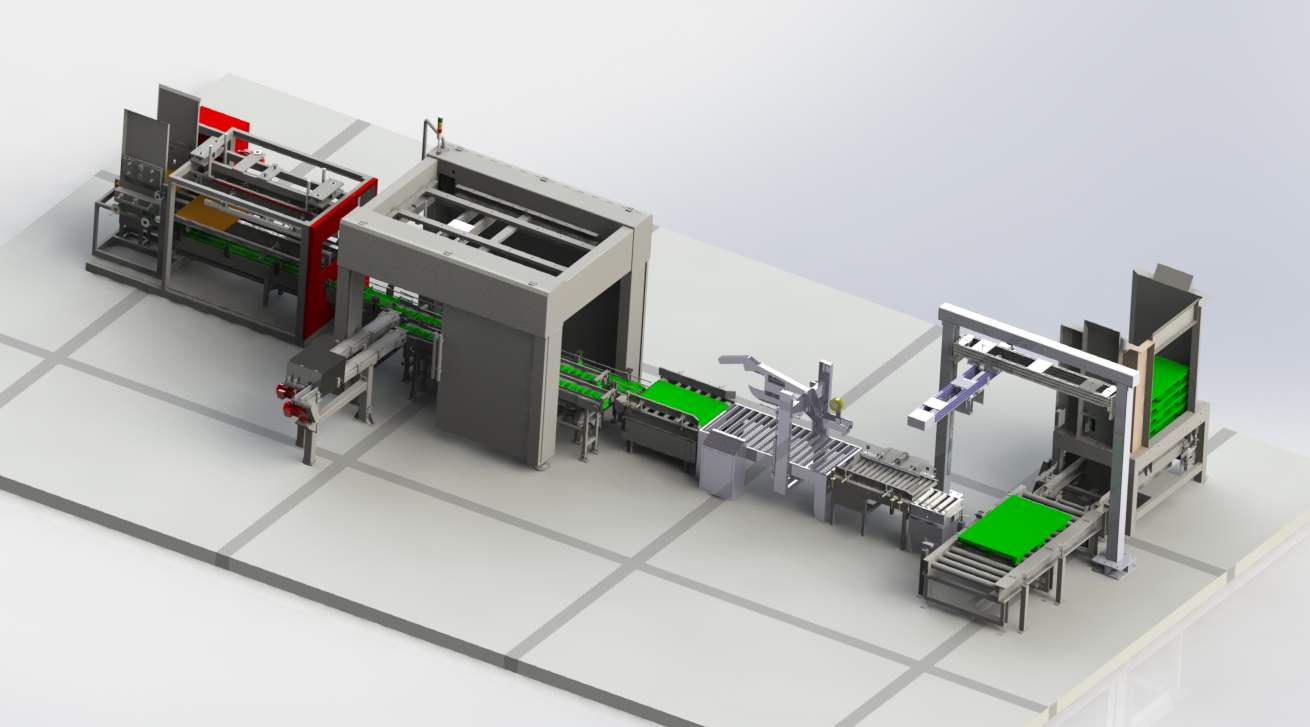
博卉包装码垛系列机器人可以实现抓取传送带上的产品然后堆垛至纸托盘中最后进行装箱的过程,主要用于巧克力、药品、小型电子元器件、零部件等。针对堆垛规格复杂的包
装设计了一种5自由度的包装堆垛机械手对不同规格的产品进行快速抓取快速放置到堆垛规格不一的各类包装盒。它可以威轻人频案的体力劳动改善劳动条件、保证安全生产 降
低能源消耗和提高生产效率在增强企业的市场竞争力等方面起到极其重要的作用。
3.如何去优化的
拓扑优化技术在满足产品约束条件的前提下能确定较合理的结构布局结构优化分为尺寸优化形状优化和拓扑优化3个不同层次的问题。变厚度法、均匀化理论和变密度法等方法
的提出能够很好的解决复杂的工程问题。 变密度方法通过人为地建立材料特性与材料密度之间的关系在拓扑优化处理后在给定的初始优化区域上能以0至1的单元密度进行分布,
然后通过控制单元的密度向0或者1两端收效可以使得拓扑优化结果便于抽象成可以工的结构因此变密度法有着明显优势并厂泛应用于工程设计中。AnsysWorkbench软件的
ShapeOptimiza-tion提供了一种尽可能地寻找对整体结构强度不产性负面影响的可去除材料的拓扑优化方法文中使用该软件对结构复杂的机械手进行有限元分析并运用了变密度
法的拓扑优化设计,在满足机械手的约束条件下确定较合理的结构布局,从而减少机械手质虽提高刚度减小机械手转动惯星和提高整体稳定性。
4.码垛机机械手的原理
机械手的结构和模型简化文中所研究的是一种隔轴机械手,该机械手的电机安装于中心轴附近 ,采用同步带传动和齿轮传动的方式来驱动各关节的运动相对于传统的机械手,该
机械手能大大地降低整机的转动惯量。机械手主要由大臂、小臂手方轴、转轴、拾取器3组电机拉伸式电磁铁、转臂架等组成电机通过- -对减速齿轮带动大臂旋转电机I通过一级
同步带带动小臂旋转电机通过一级同步带带动转轴再通过二级同步带带动手方轴旋转拉伸式电磁铁带动手方轴上下运动,拾取器通过气动或电动驱动上下摆动(吴体结构文中未表
示)。在该机械手样品试制中发现由于同步带包裹在机械臂内部导致同步带安装困难文中在后续中对机械手手臂进行优化的挖空能够很好的解决这一问题。